NASA May Test Refueling Satellites On ISS
Jan 12, 2010
By Frank Morring, Jr.
Engineers at NASA’s Goddard Space Flight Center are developing an in-orbit test bed to validate techniques for refueling satellites that weren’t designed to be refueled, using procedures growing out of the experience gained servicing the Hubble Space Telescope.
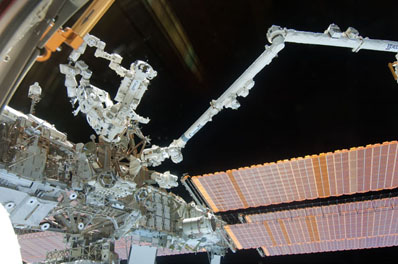
Preston Burch, the Hubble program manager, said Jan. 11 that the experiment would use the Canadian-built Special Purpose Dexterous Manipulator, known as Dextre, to simulate cutting into a spacecraft’s insulation, tapping into its fuel plumbing, and refilling its tanks to extend its service life.
“We’ve already developed a prototype tool that’s pretty cool that can cut through the external skin or insulation on the satellite, snip the safety wire on the cap on the fuel valve, attach the hose and turn the valve and transfer the fuel into the vehicle,” Burch said. “We’re hoping to demonstrate that on the International Space Station.”
The work started with $20 million that Congress appropriated in Fiscal 2009 to capture the lessons learned from the five Hubble-servicing missions with spacewalking astronauts, and the planning that went into a robotic servicing mission that ultimately was dropped. Burch stressed that the appropriation doesn’t cover an actual flight test, which would involve attaching a test bed to the outside of the station and putting Dextre to work on it.
“This is being proposed,” Burch said. “We’re laying the groundwork for doing that in the future funding that we expect will be coming to this team.”
The Goddard team is also soliciting ideas from industry and space agencies worldwide on how to use in-space servicing to enable “previously impossible” missions like refueling satellites. Responses to a Dec. 8 request for information are due Jan 15, with a workshop planned next month to refine the effort.
The study, which was ordered by Congress in appropriating the $20 million, will gauge how robotic and human servicing can aid several notional missions in low Earth orbit, geostationary orbit and at the sun-Earth Lagrange points about 1 million miles from Earth. In addition to refueling spacecraft, possibilities include installing new instruments and assembling spacecraft too large to launch in one piece, Burch said.
A final report on study results is due on Capitol Hill in September.