E
EarthlingX
Guest
http://www.esa.int : Next step for ESA’s first Moon lander
wsn.spaceflight.esa.int : Overview of the Lunar Lander Programme (video)
16 September 2010
Mission description: land autonomously with pinpoint precision near the Moon’s south pole, a region full of dangerous boulders and high ridges. The aim of ESA’s proposed precursor is to probe the moonscape’s unknowns and test new technology to prepare for future human landings.
The first mission to visit the south polar region of the Moon took a significant step forward today when a further study contract was signed with EADS-Astrium in Berlin, Germany.
The mission aims to land in the mountainous and heavily cratered terrain of the lunar south pole in 2018. The region may be a prime location for future human explorers because it offers almost continuous sunlight for power and potential access to vital resources such as water-ice.
To reach the surface safely, the lander must precisely navigate its way to a mountain peak or crater rim, carefully avoiding boulders and steep slopes before gently setting down to take in one of the most spectacular views in the Solar System.
The Moon is a favoured target for the human exploration missions outlined in the ‘Global Exploration Strategy’ by 14 space agencies around the world. The strategy supports international space exploration and calls for further studies of the Moon and Mars – places where humans will one day live and work.
18-month effort begins in Berlin today
The contract was signed by Simonetta Di Pippo, ESA’s Director of Human Spaceflight, and Michael Menking of EADS-Astrium, in the presence of Peter Hintze, Parliamentary State Secretary in the German Federal Ministry of Economics and Technology.

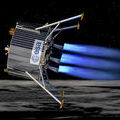
Proposed robotic lunar lander
The start of this ‘Phase-B1’ study is an important milestone because now, after the preliminary planning and feasibility studies, the mission’s design will be continued under the leadership of EADS-Astrium Bremen and some of the key technologies will be developed and tested for the first time.
First, the most recent topographic data covering the Moon’s south pole will be analysed in detail to find the promising landing sites. The target area is poorly understood and only now are we are beginning to receive the information needed to consider landing and operating a mission there.
Then, the robotic lander will be designed down to the level of its various subsystems, such as propulsion and navigation.
The contract will culminate in a ‘Preliminary System Requirements Review’ in 2012, which will provide the basis for the final design of the mission and lander.
wsn.spaceflight.esa.int : Overview of the Lunar Lander Programme (video)